Ik heb geprobeerd op micro leds in de liftkooien te bouwen en vooralsnog is dat gelukt.
Of de stroomdraadjes bestand zijn tegen de op en neer gaande bewegingen moet blijken.
Voor de zekerheid komen er ook nog wel wat Leds in de liftschacht zelf.
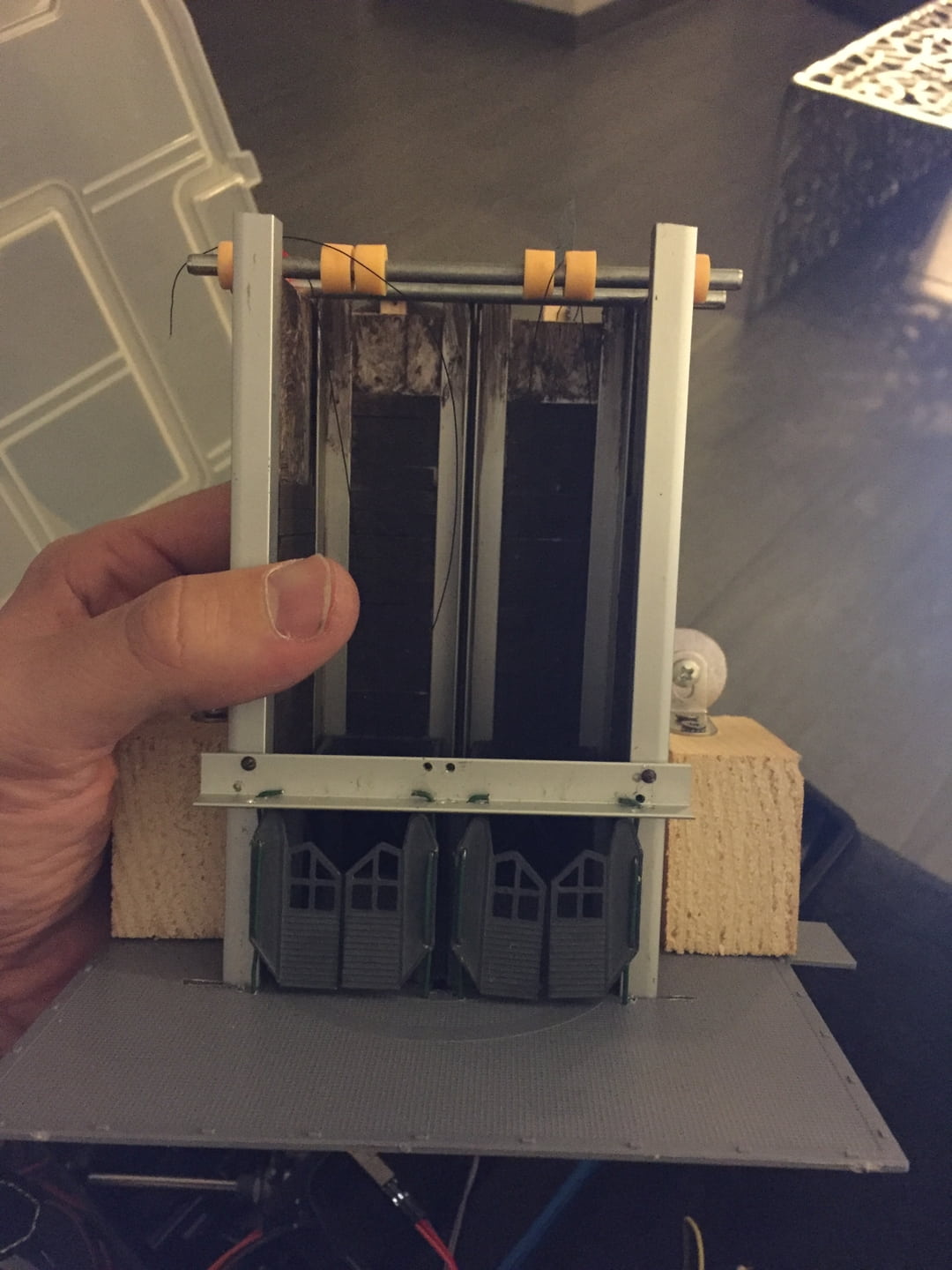
Vandaag geprobeerd de deurtjes en servo's te plaatsen.
Nadat ik menig mislukte pogingen heb gehad wat betreft de deurtjes, is hier het resultaat.
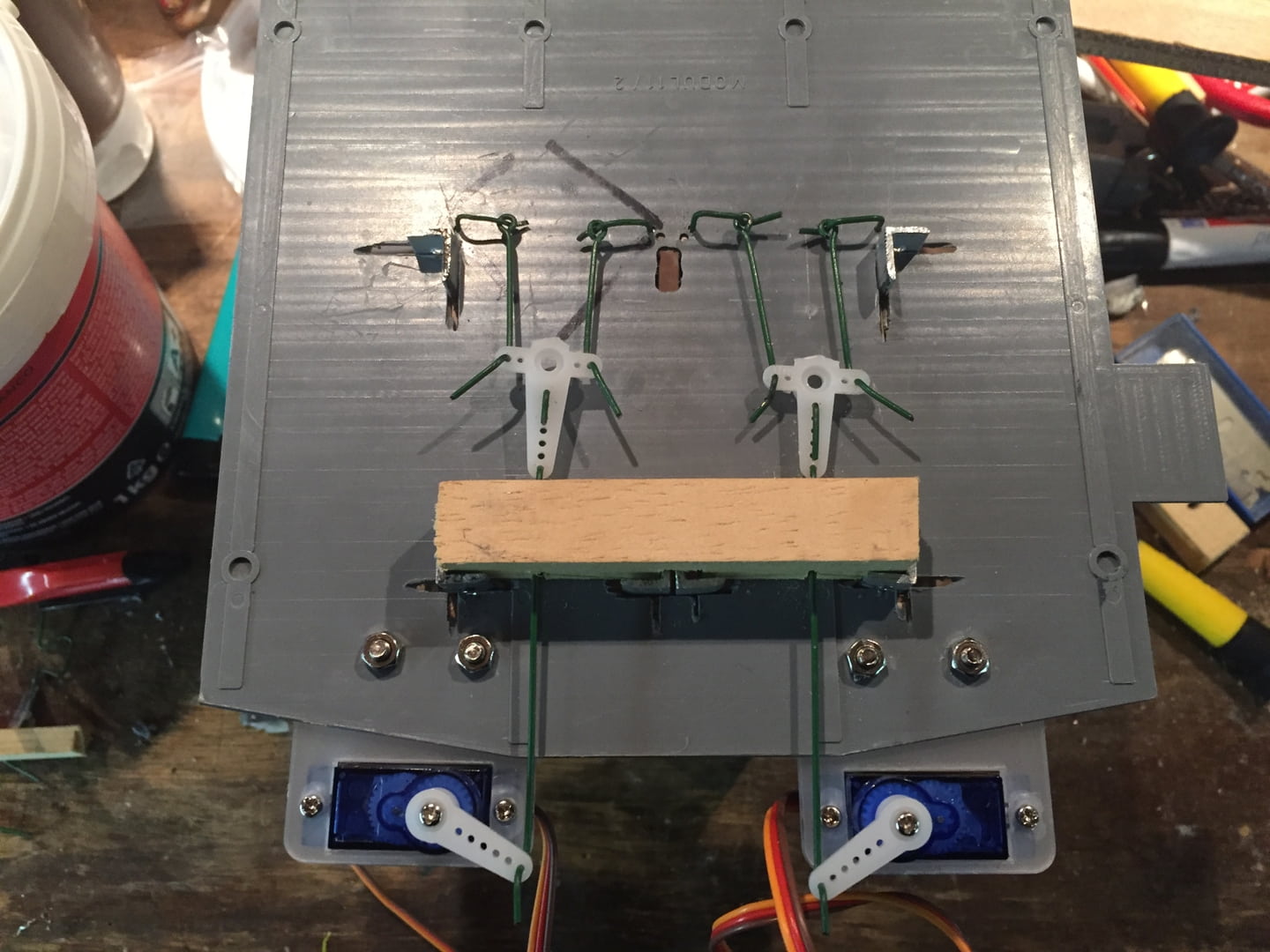
Aan de achterzijde een aantal servo's gemaakt, twee voor de deurtjes en twee met hefbomen voor de liftkooien.
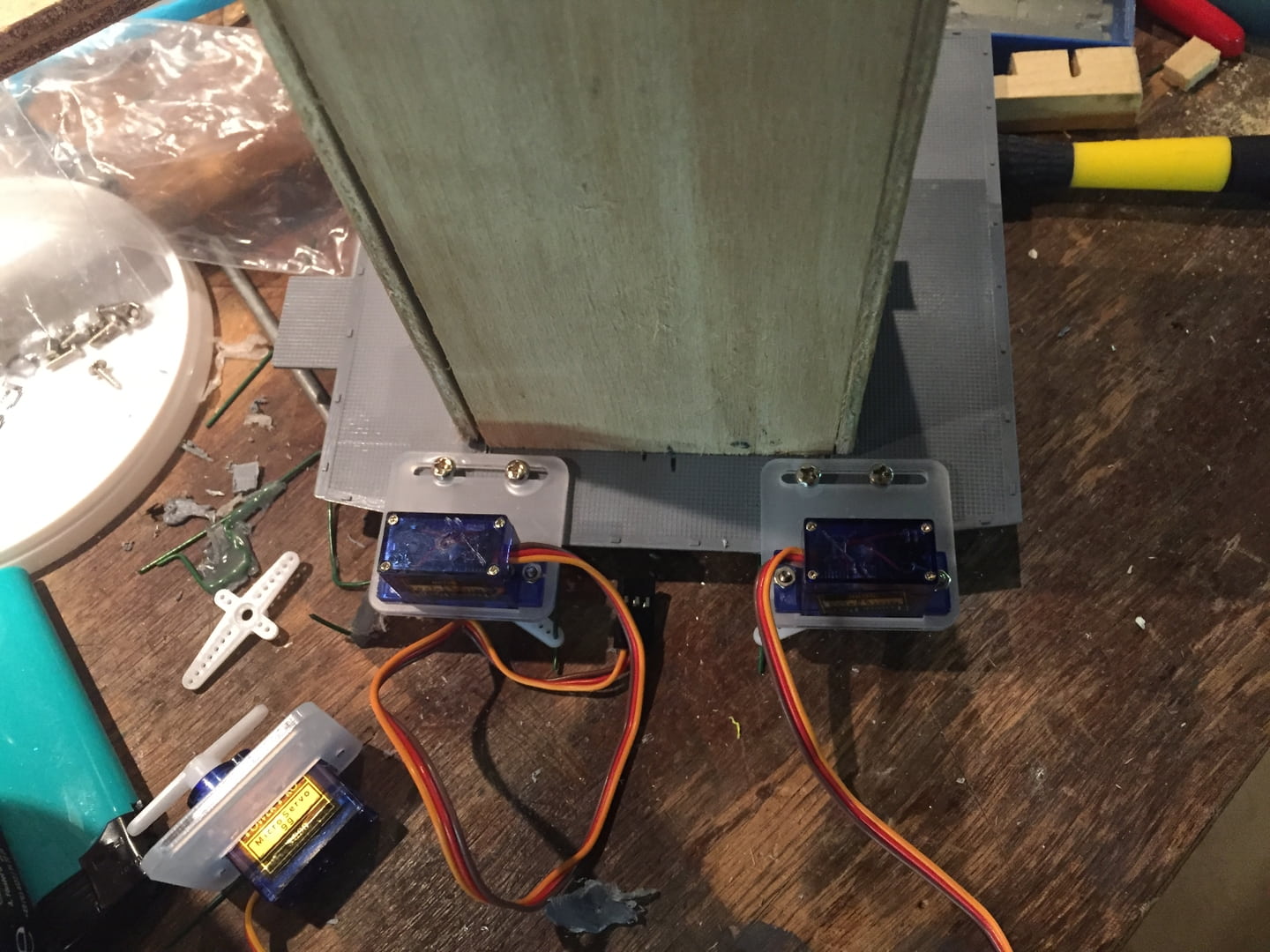
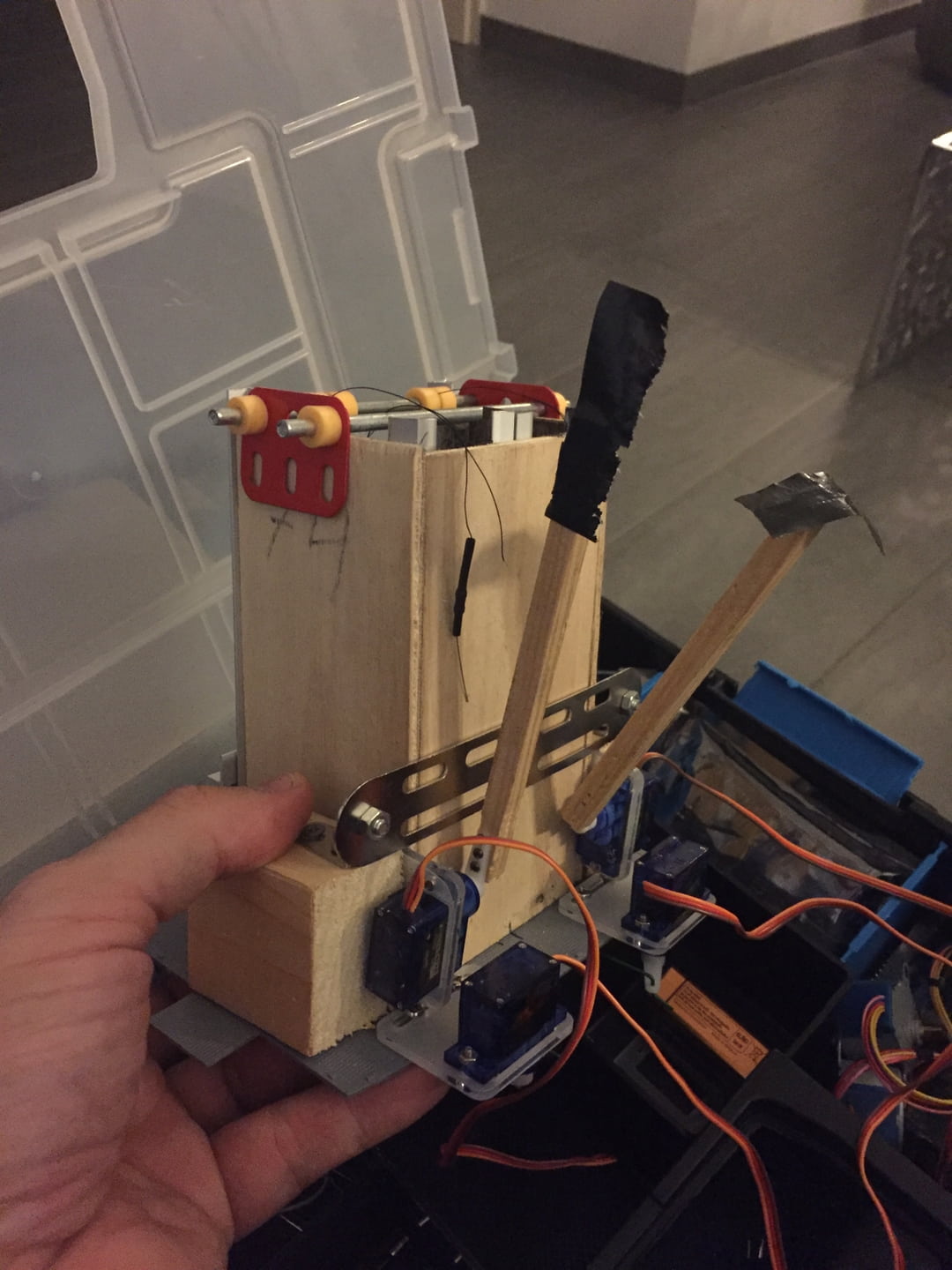
Ik ben van plan om ze m.b.v. arduino aan te sturen, maar ik loop tegen een aantal problemen op.
Probleem 1, de servo's slaan direct naar een verkeerd, te ver punt uit, zodra de arduino wordt aangezet.
Probleem 2, de servo's blijven brommen.
Mijn gebruikte sketch;
#include <Servo.h>
Servo myservo1; // create servo object to control a servo
Servo myservo2;
Servo myservo3;
Servo myservo4;
// twelve servo objects can be created on most boards
int pos = 180; // variable to store the servo position
void setup() {
myservo1.attach(

; // deur links
myservo2.attach(9); // lift links
myservo3.attach(10); // deur rechts
myservo4.attach(11); // deur rechts
}
void loop() {
for (pos = 90; pos <= 140; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo1.write(pos); // tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}
for (pos = 140; pos >= 90; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo1.write(pos); // tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}
for (pos = 130; pos <= 240; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo2.write(pos); // tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}
for (pos = 240; pos >= 130; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo2.write(pos); // tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}
for (pos = 0; pos <= 50; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo3.write(pos); // tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}
for (pos = 50; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo3.write(pos); // tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}
for (pos = 130; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo4.write(pos); // tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 130; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo4.write(pos); // tell servo to go to position in variable 'pos'
delay(50); // waits 15ms for the servo to reach the position
}
}
Heb ik de verkeerde sketch gebruikt?


