weatheren van de wielenOm de wielen van de wagens te behandelen heb ik voorheen een aantal methoden uitgeprobeerd, en ze bevielen allemaal niet.
Eerst probeerde ik, na het ontvetten met alcohol, om vele dunne laagjes Vallejo aan te brengen. Dat ziet er mooi uit, maar is erg kwetsbaar.
Daarna heb ik (op advies, 'het hecht zelfs op glas') geprobeerd om de verf sterker te maken door te werken met Createx. Ook dat bleek kwetsbaar.
Vervolgens heb ik (op advies) Mr. Metal gebruikt als basislaag, en ook dat vond ik niet echt succesvol.
Nu gebruik ik een primer uit de spuitbus, en dat hecht erg goed. De randjes langs het loopvlak van het wiel beschadigen nauwelijks.
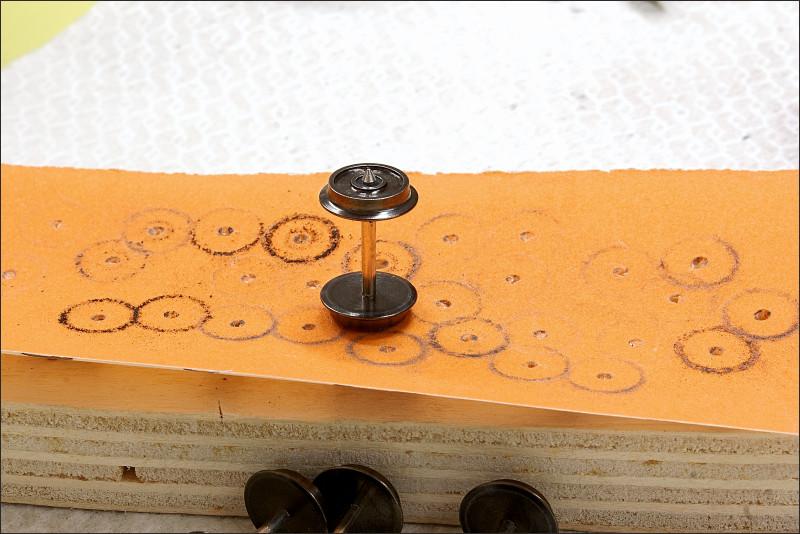
Eerst heb ik de wielen licht geschuurd op een blokje hout met een gaatje erin. Daarna is alles goed ontvet met 99% alcohol. De loopvlakken en flenzen heb ik met tape gemaskeerd.
Gebruikt materiaal:
Binnen een uur na het spuiten heb ik de punten van de assen gereinigd.
De kleur is aangepast naar de basiskleur van de spoorstaven met Vallejo.
Gebruikte materialen:
- Vallejo modelair - 71.249 (5 delen)
- Vallejo modelair - 71.040 (2 delen)
De volgende lagen zijn opgebouwd uit pigment en transparante lak.
Eerst is een laag pigment met een door mij samengestelde kleur aangebracht. Deze is vervolgens met blanke lak geseald. Voor een dikkere en stabielere laag heb ik dit nogmaals herhaald.
Gebruikte materialen:
- Vallejo pigment natural umber - 73.109 (1 deel)
- Vallejo pigment old rust - 73.120 (2 delen)
- Vallejo pigment carbon black - 73.116 (10 delen)
- Bergswerk blanke lak - Tiefmatt
De wielband heb ik eerst bedekt met een laag pigment. Daarna heb ik deze geseald met een laklaag. Na een droogtijd van een half uur heb ik opnieuw een pigmentlaag aangebracht, en deze is ook weer verzegeld met lak.
Gebruikte materialen:
- Vallejo pigment old rust - 73.120
- Bergswerk blanke lak - Tiefmatt
Om te zorgen dat mijn wagens allemaal gedetecteerd worden op de baan, heb ik smd weerstanden geplaatst tussen as en geïsoleerd wiel. De weerstanden zijn 10kOhm, en zijn met secondelijm bevestigd. Dat deed ik voorheen ook al zo. Destijds gebruikte ik weerstandslak om de verbinding tussen de as/wiel en de smd weerstand te maken. Dat bleek niet handig. De totale weerstand tussen de as en het geïsoleerde wiel is te veel afhankelijk van de hoeveelheid weerstandslak.
Ik ben overgestapt op elektrisch geleidende lak.
Gebruikt materiaal:
- Mesa - elektrisch geleidende zilververf
Ik dacht hiermee klaar te zijn met de kolenwagens. Even een
foto gemaakt van een paar wagens ... en daar stoorde mij toch iets.
De blinkende assen onder de wagens verpesten natuurlijk het hele beeld, dus ... De assen weer van de wagens gehaald, en de assen en binnenzijde van de wielen een kleurtje gegeven. Eerst heb ik het metaal geschilderd met matte zwarte verf, en daarna is alles met twee lagen pigment/blanke lak behandeld.
Gebruikte materialen:
- Revell - Email Color mat zwart
- Ammo - Track Rust 3008
- Bergswerk blanke lak - Tiefmatt


 Recente berichten
Recente berichten Dat zal weer een mooi mergelstenen bouwwerk worden Bert.
Dat zal weer een mooi mergelstenen bouwwerk worden Bert. Ik wacht nog op een nieuwe drijfstang, maar dan een uit 1 stuk. Niet waarheidsgetrouw maar wel bedrijfszeker.
Ik wacht nog op een nieuwe drijfstang, maar dan een uit 1 stuk. Niet waarheidsgetrouw maar wel bedrijfszeker.